

Робота з цілями
Як тільки цілі прив'язані до розрахунку в Skymap, вони автоматично синхронізуються з інтерфейсом SkyHunter.
Передача даних відбувається в реальному часі, тому новостворені або перекласифіковані об’єкти повинні з’явитися на мапі SkyHunter без додаткових дій з боку оператора.
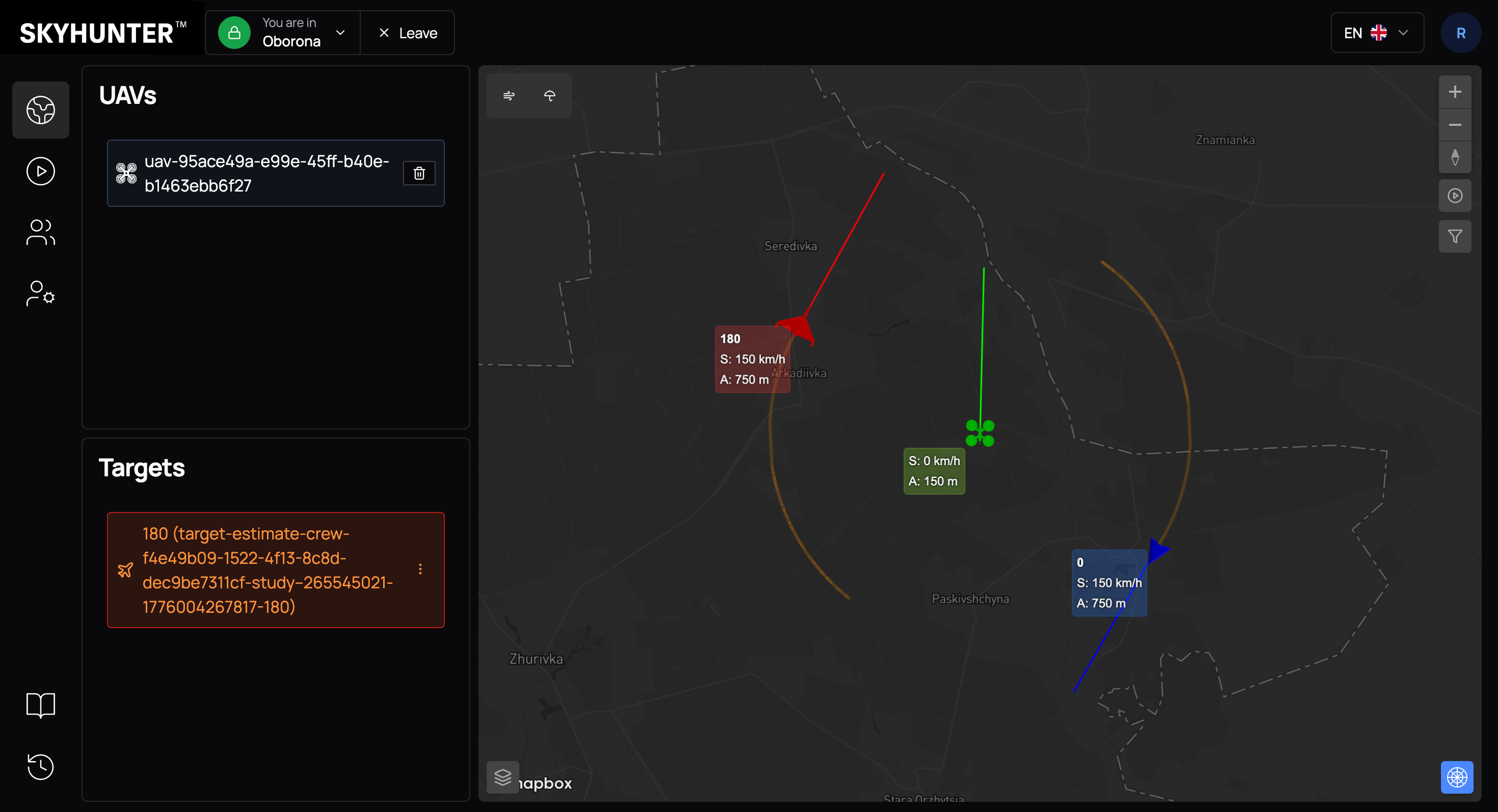
Після синхронізації ціль:
- відображається на мапі;
- отримує відповідний статус (свій/ворожий);
- стає доступною для подальшої прив’язки до БПЛА;
- може використовуватися алгоритмами супроводу та перехоплення.
Прив'язуємо БПЛА до цілі.
Після появи ворожої цілі на мапі наступним кроком є закріплення за нею дрона-перехоплювача. Якщо в зоні присутній БПЛА, який:
- активний;
- не виконує іншу місію;
- не прив’язаний до жодної цілі;
система SkyHunter може автоматично запропонувати закріпити ціль за доступним БПЛА. Такий механізм спрощує роботу оператора та прискорює реакцію на загрозу.
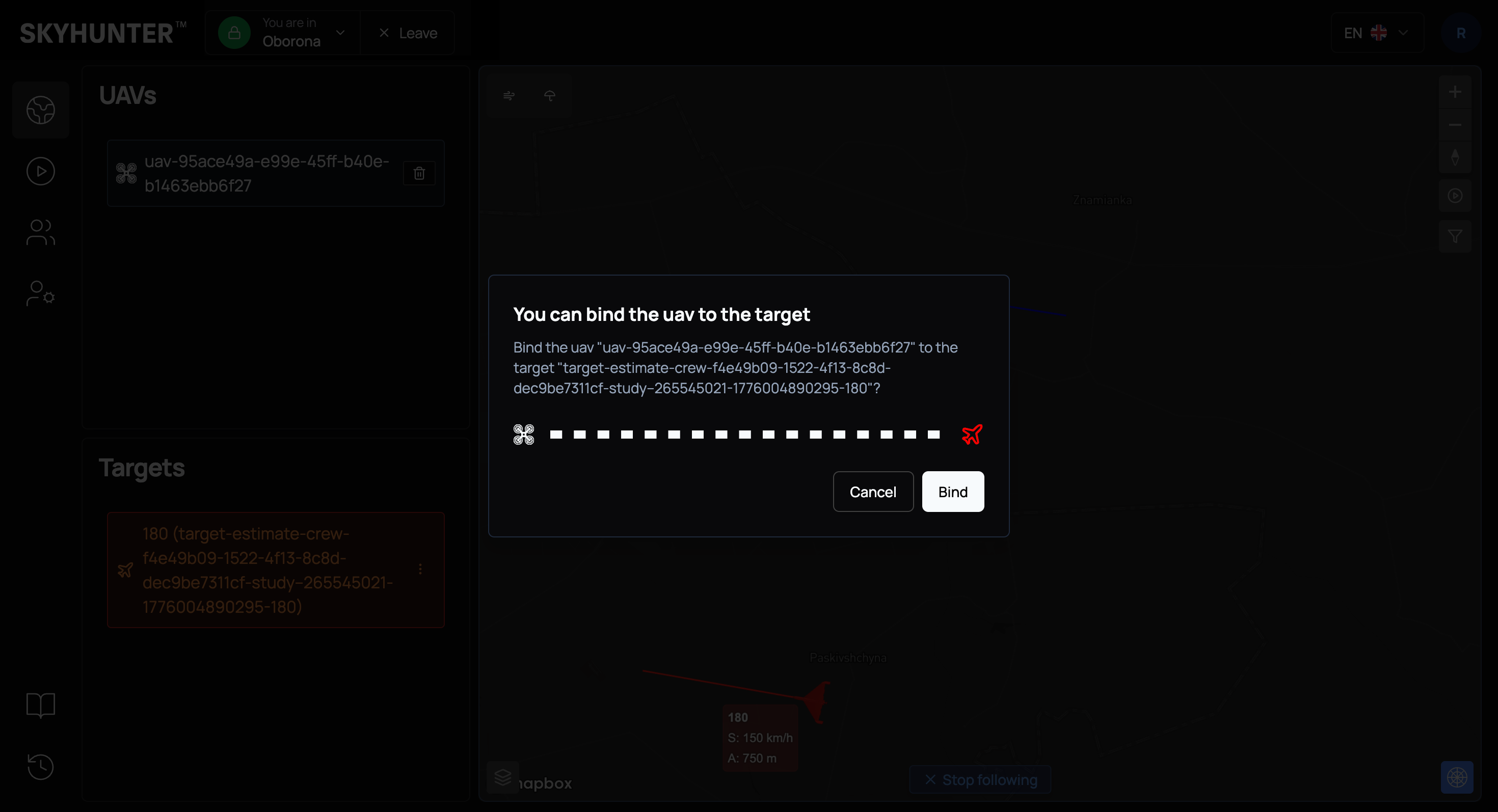
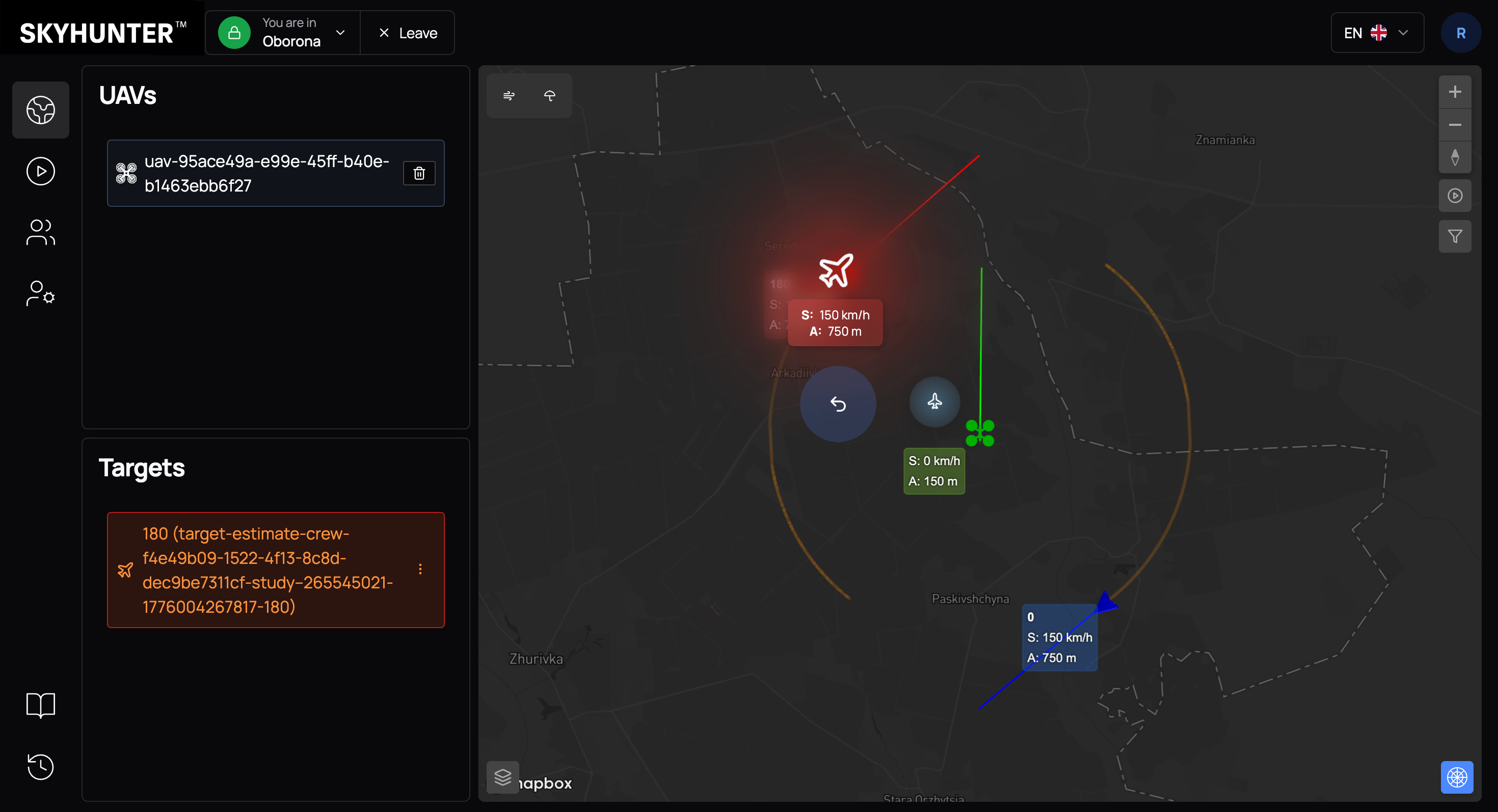
Також можно закріпити ціль за БПЛА в ручному режимі. Для цього потрібно клікнути на ворожому літаку та натиснути на іконку маленького літака, яка знаходиться між нашим БПЛА та ворожим літаком.
Після успішної прив’язки:
- між БПЛА та ціллю з’являється пунктирна лінія;
- система фіксує зв’язок у журналі екіпажу;
- у верхній частині радіального меню БПЛА з’являється новий пункт — Unbind target (Відʼєднати від цілі).
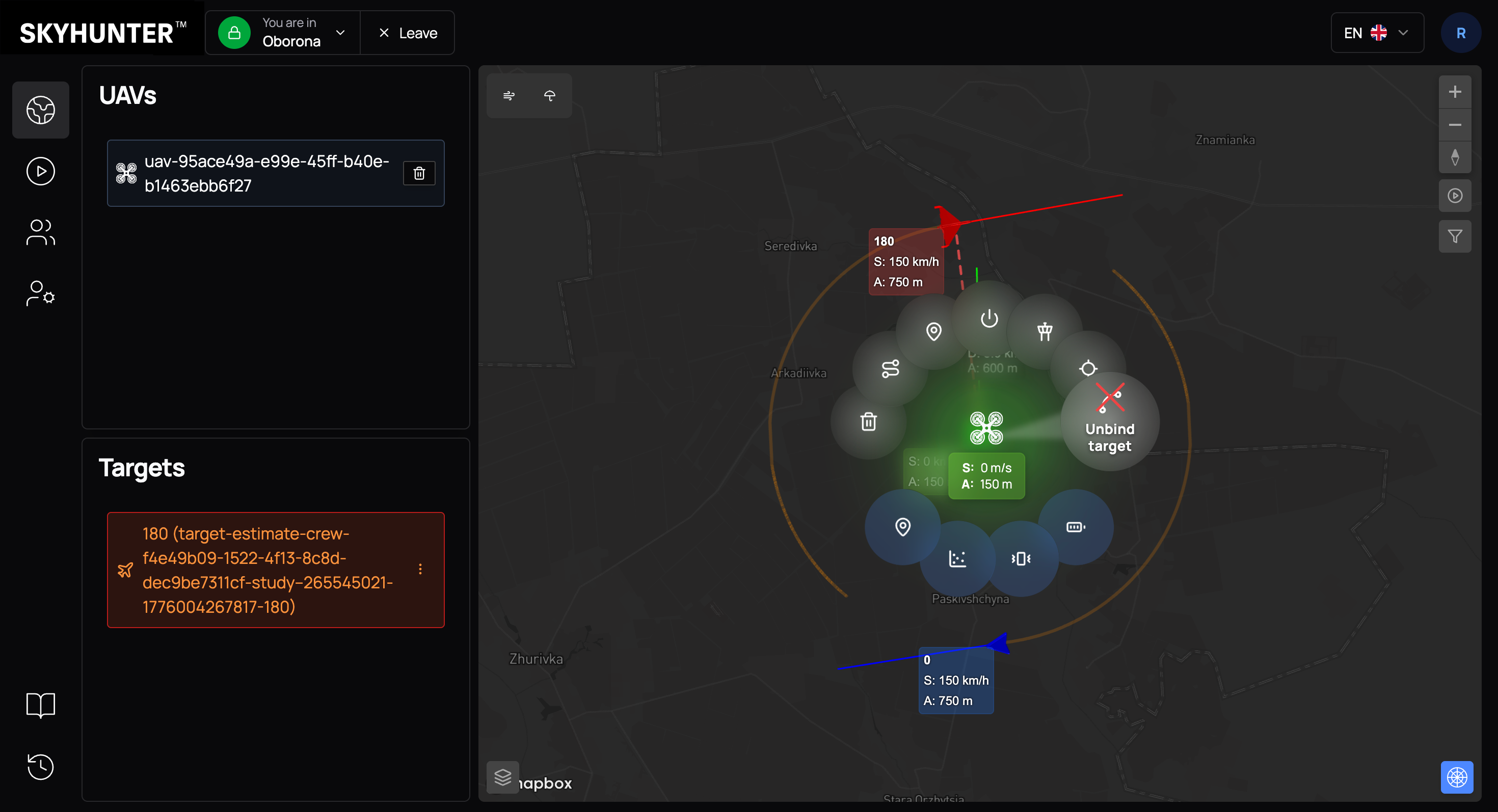
WARNING
Команда Unbind target дозволяє:
- скасувати перехоплення;
- змінити ціль;
- звільнити БПЛА для нового завдання.
Запуск місії.
Після прив’язки цілі можна розпочинати місію перехоплення.
Для запуску:
- Клікаємо на БПЛА.
- У радіальному меню натискаємо Arm (Запустити).
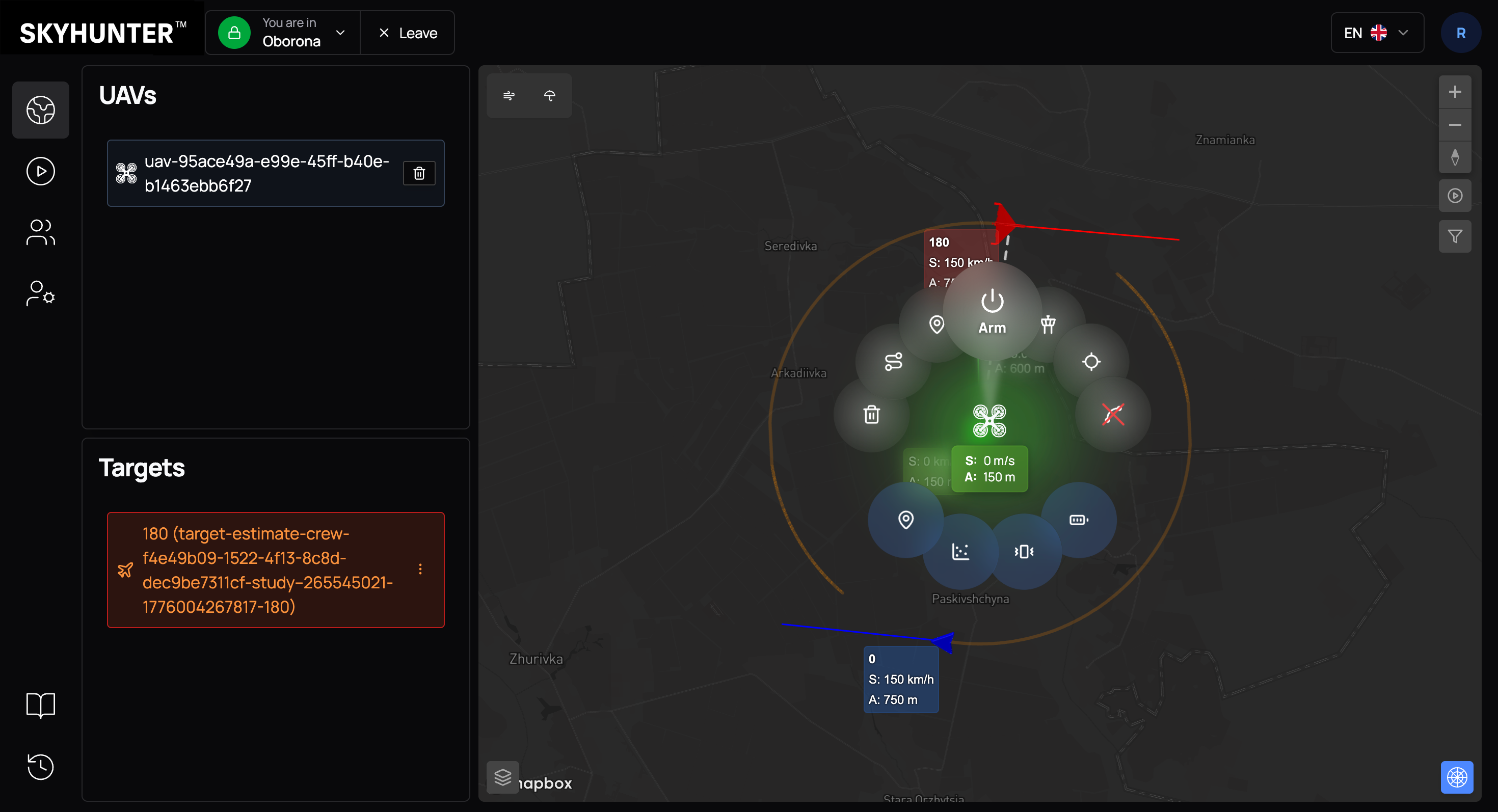
Після активації:
- дрон переходить у стан озброєння;
- запускаються двигуни;
- починається автоматичний набір висоти;
- активується алгоритм супроводу цілі.
Дрон-перехоплювач переходить у автоматичний режим та починає рух у напрямку цілі відповідно до обраного типу навігації та алгоритму перехоплення.
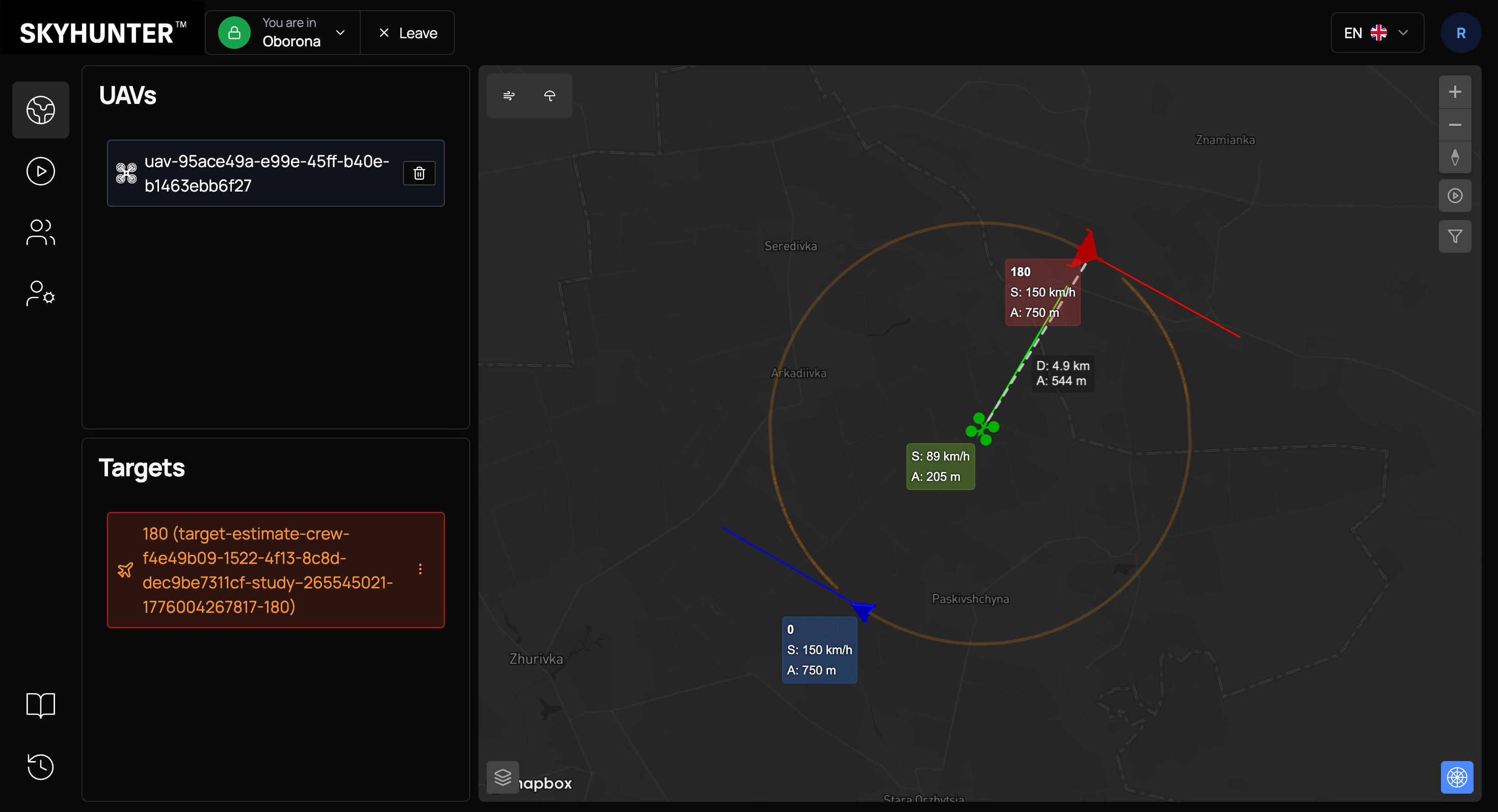
У процесі польоту система:
- коригує траєкторію в реальному часі;
- враховує швидкість та напрямок руху цілі;
- відображає актуальну телеметрію;
- підтримує можливість ручного втручання оператора за необхідності.