Радіальне меню БПЛА
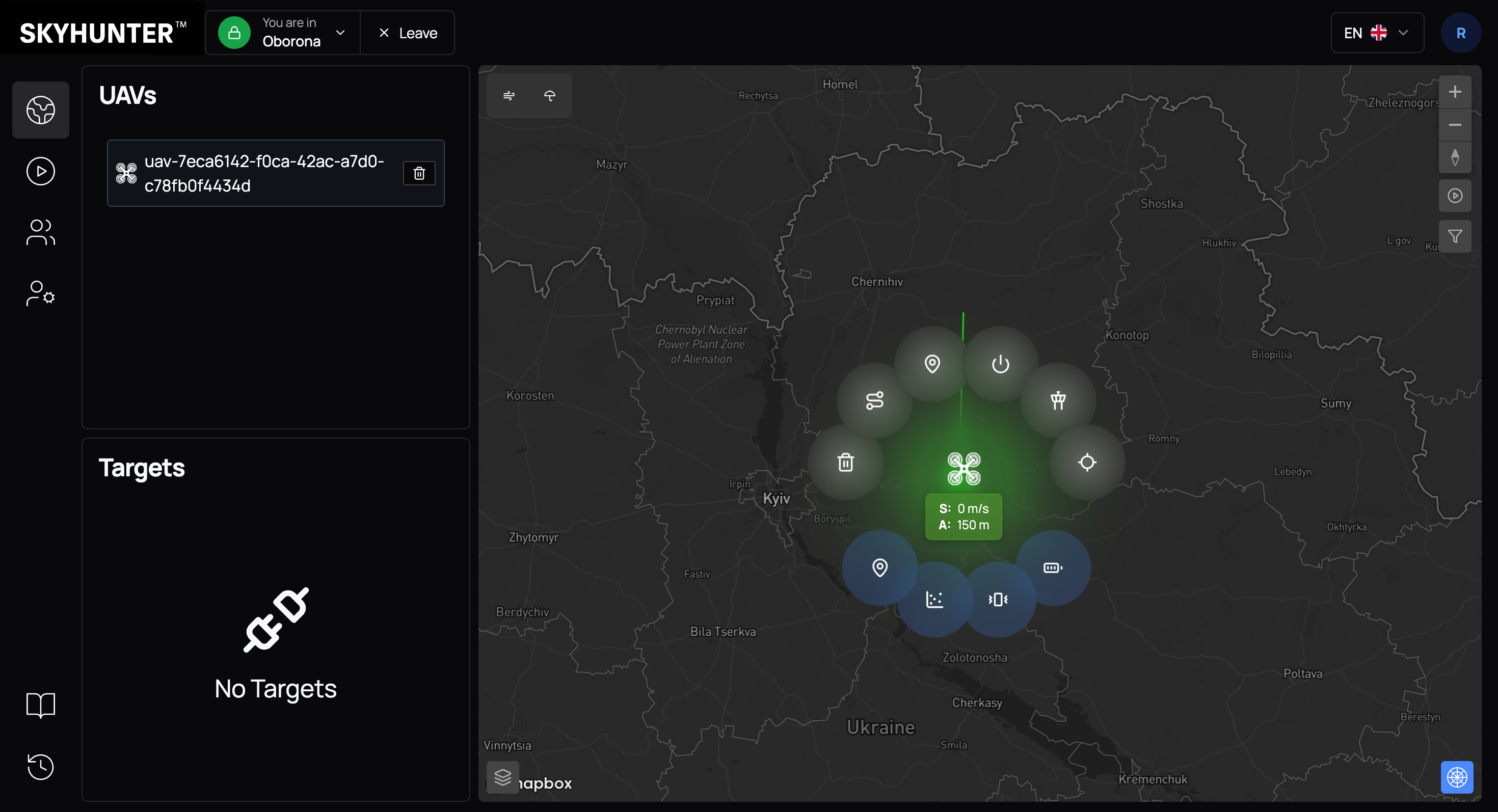
Для детального керування БПЛА в SkyHunter використовується радіальне меню – інтуїтивний інтерфейс швидкого доступу до команд та діагностики.
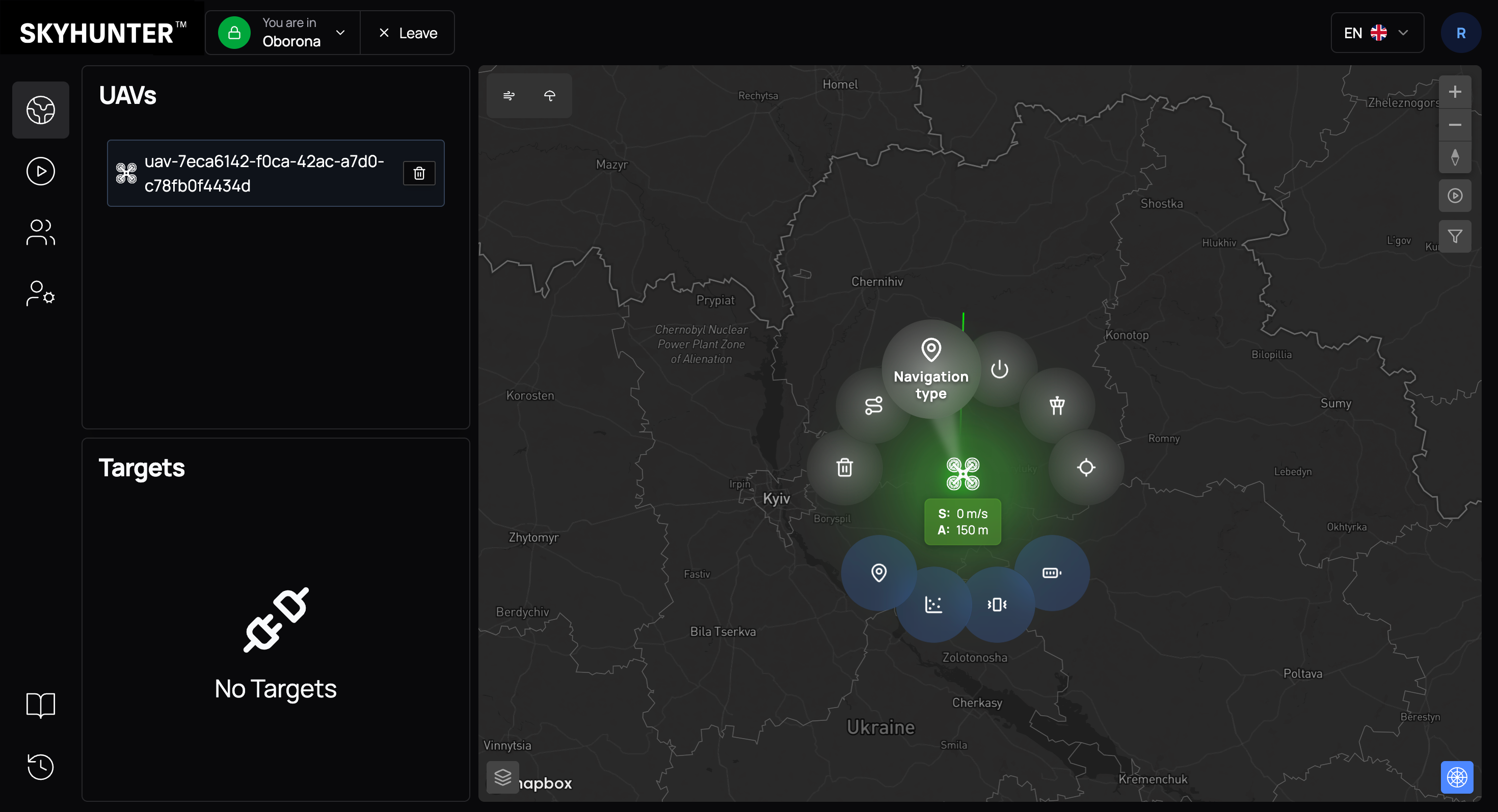
Меню відкривається натисканням на іконку дрона на мапі. Після цього навколо БПЛА з’являється коло керування, яке розділене на дві функціональні зони:
- верхня секція – оперативні команди керування;
- нижня секція – діагностика та технічні параметри.
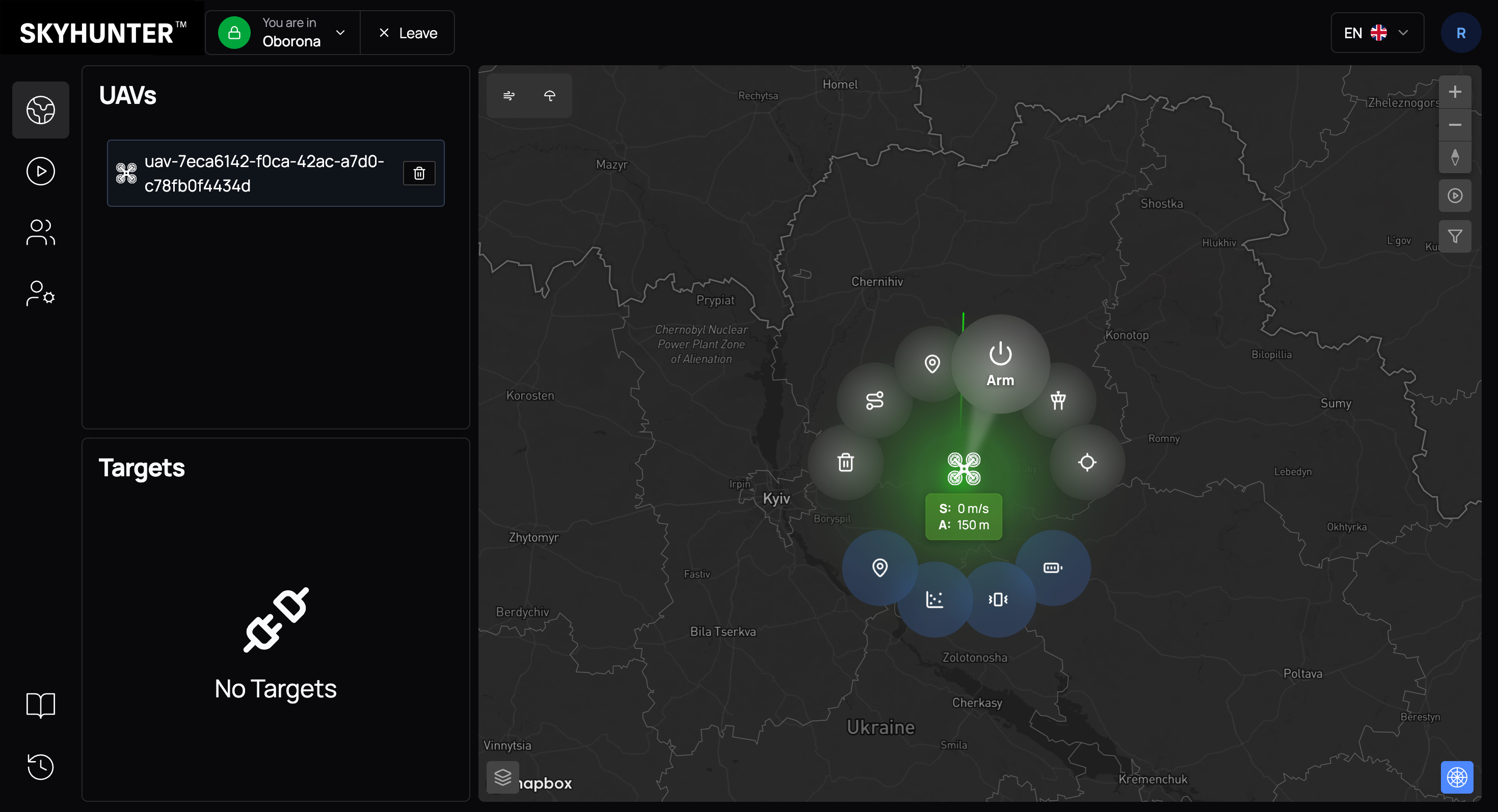
Верхня секція – оперативне керування
У верхній секції розташовані основні команди, які впливають на поведінку БПЛА в реальному часі.
Arm/Disarm
Команда ініціалізації та запуску моторів. Після активації дрон переходить у стан готовності до польоту.
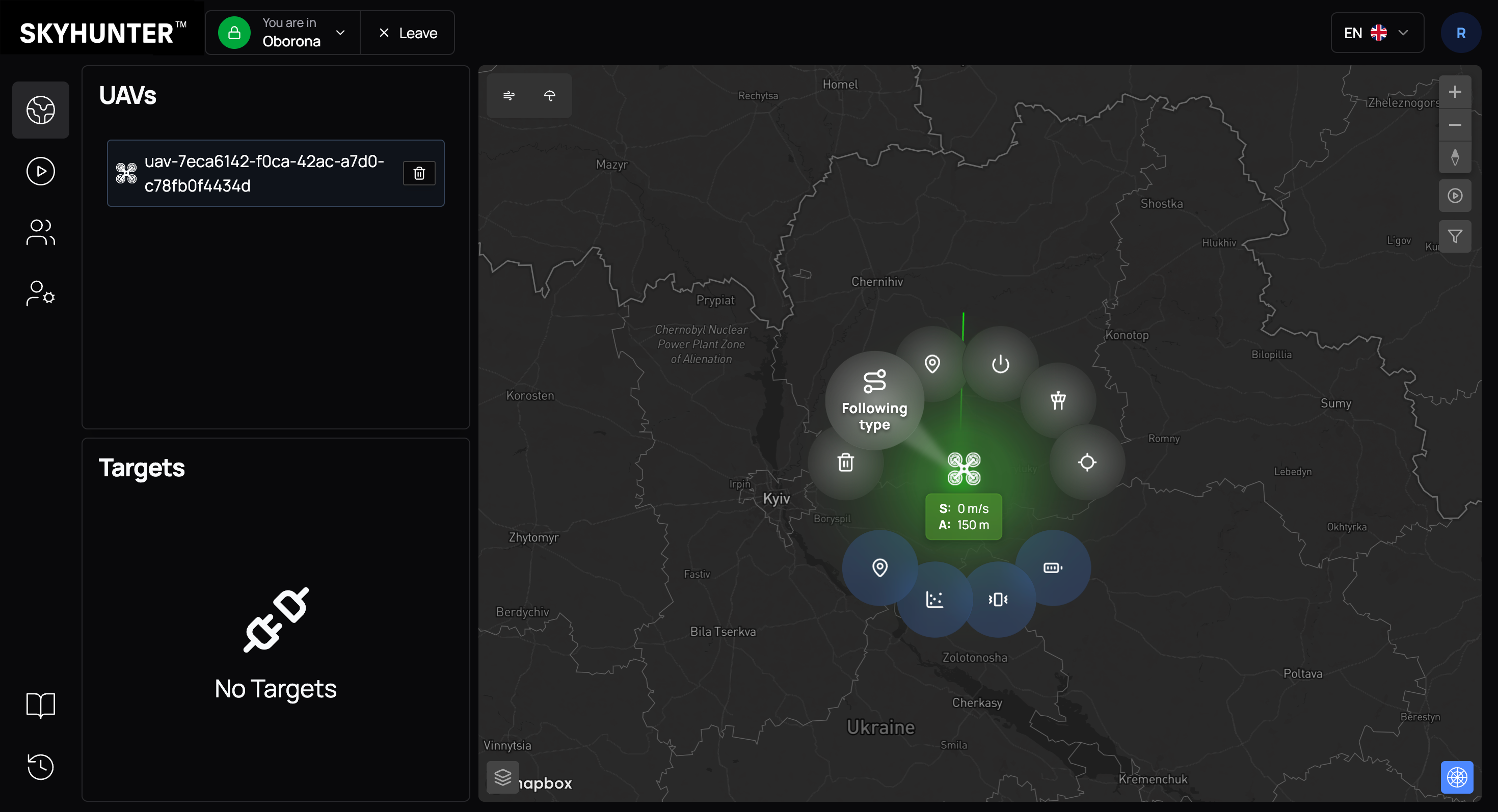
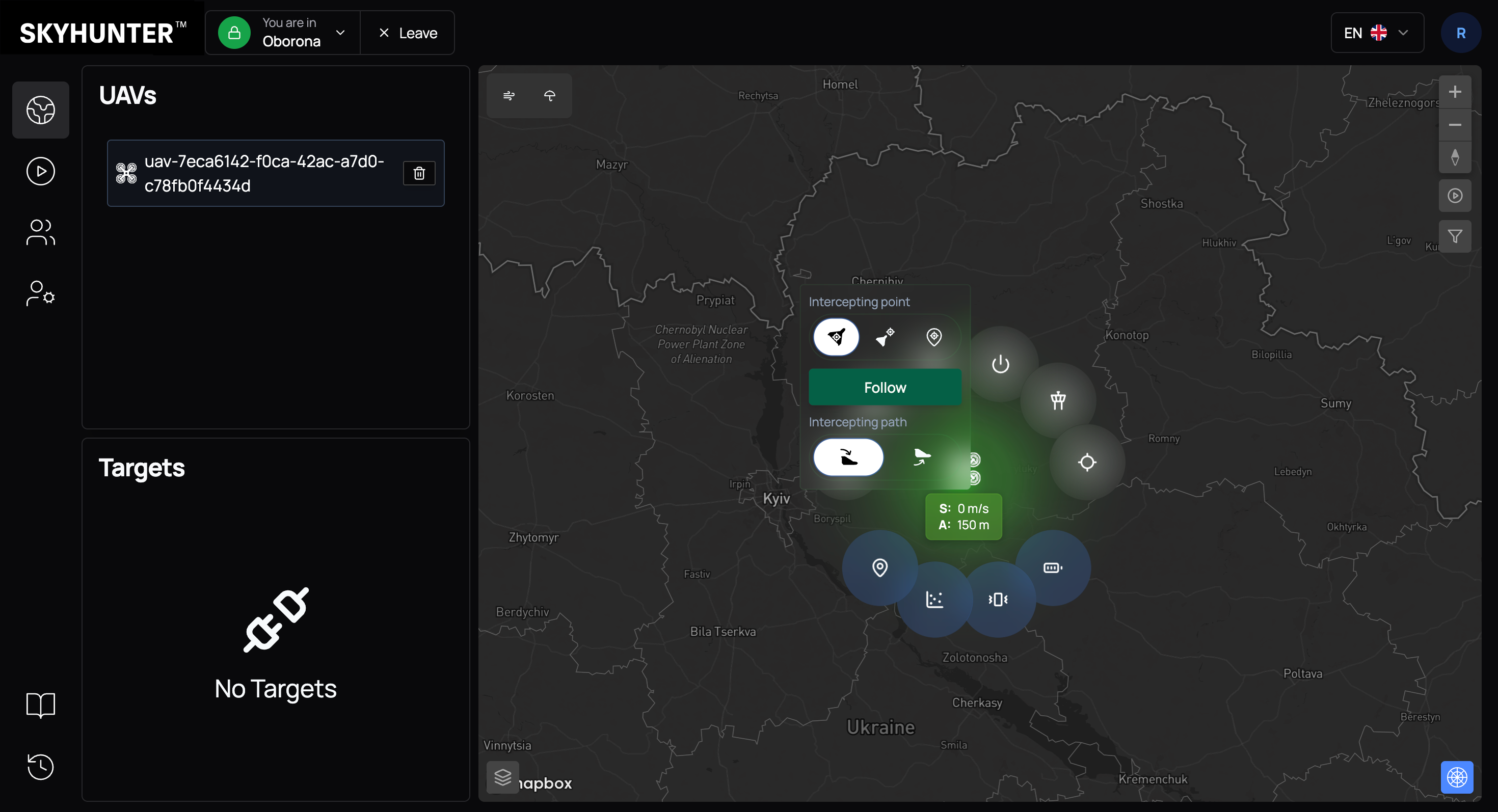
Following type
Відкриває налаштування алгоритму супроводу цілі (тип перехоплення). Доступні різні моделі поведінки – наприклад, пряме переслідування, перехоплення з випередженням або політ по заданим координатам.
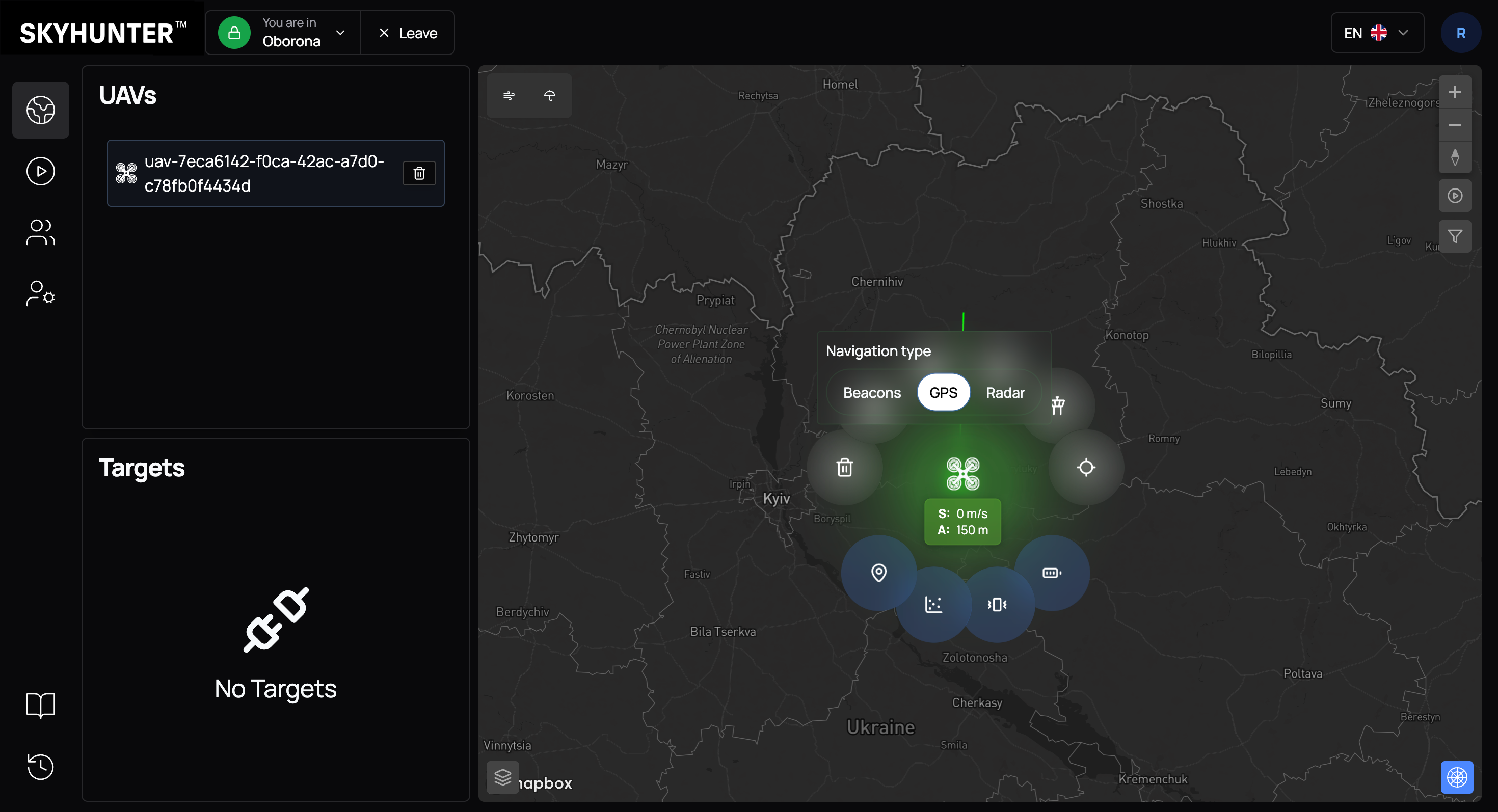
Navigation type
Дозволяє обрати джерело навігації:
- Beacons – позиціонування через наземні маяки;
- GPS – супутникова навігація;
- Radar – позиціонування на основі радарних даних.
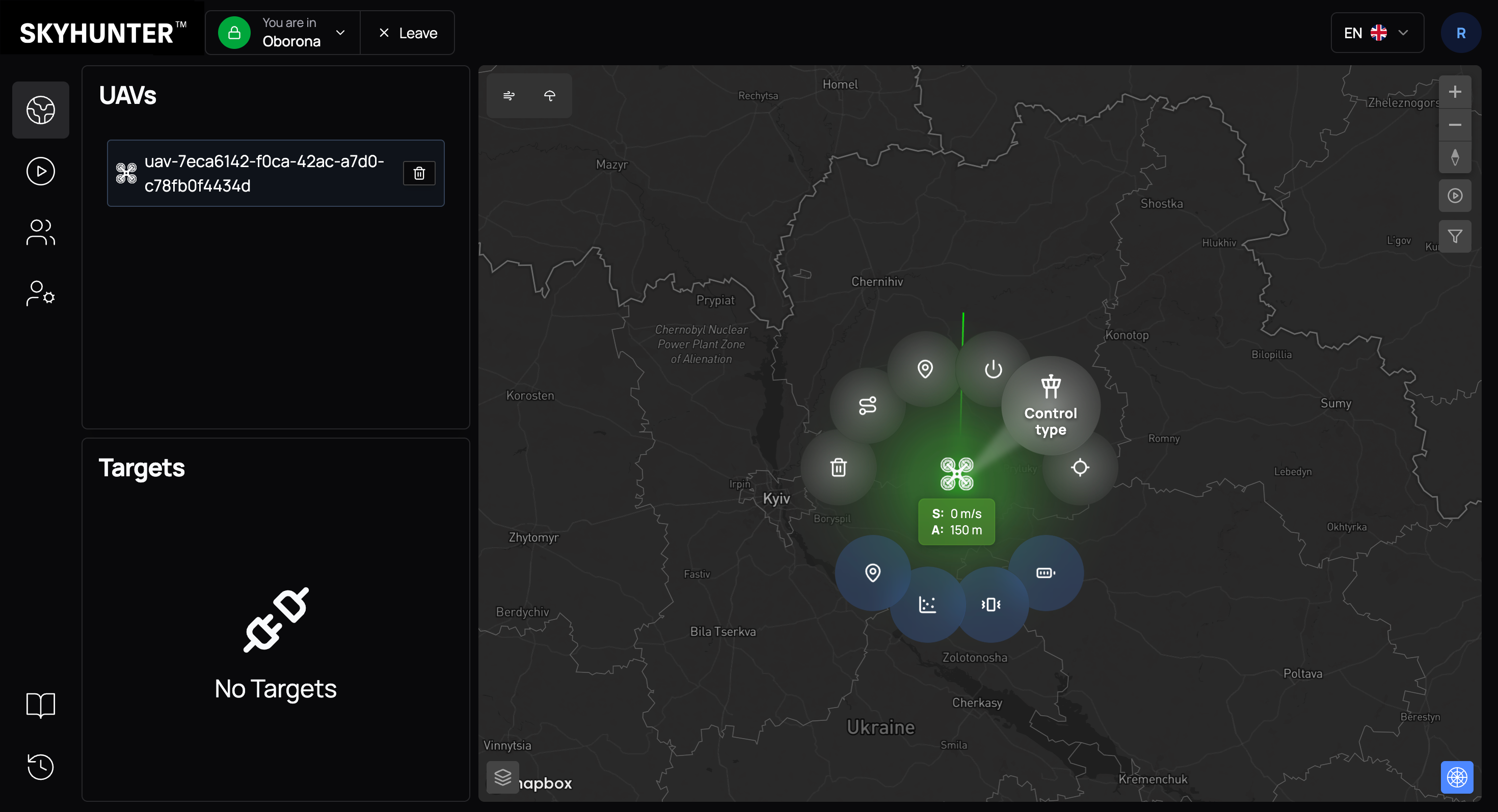
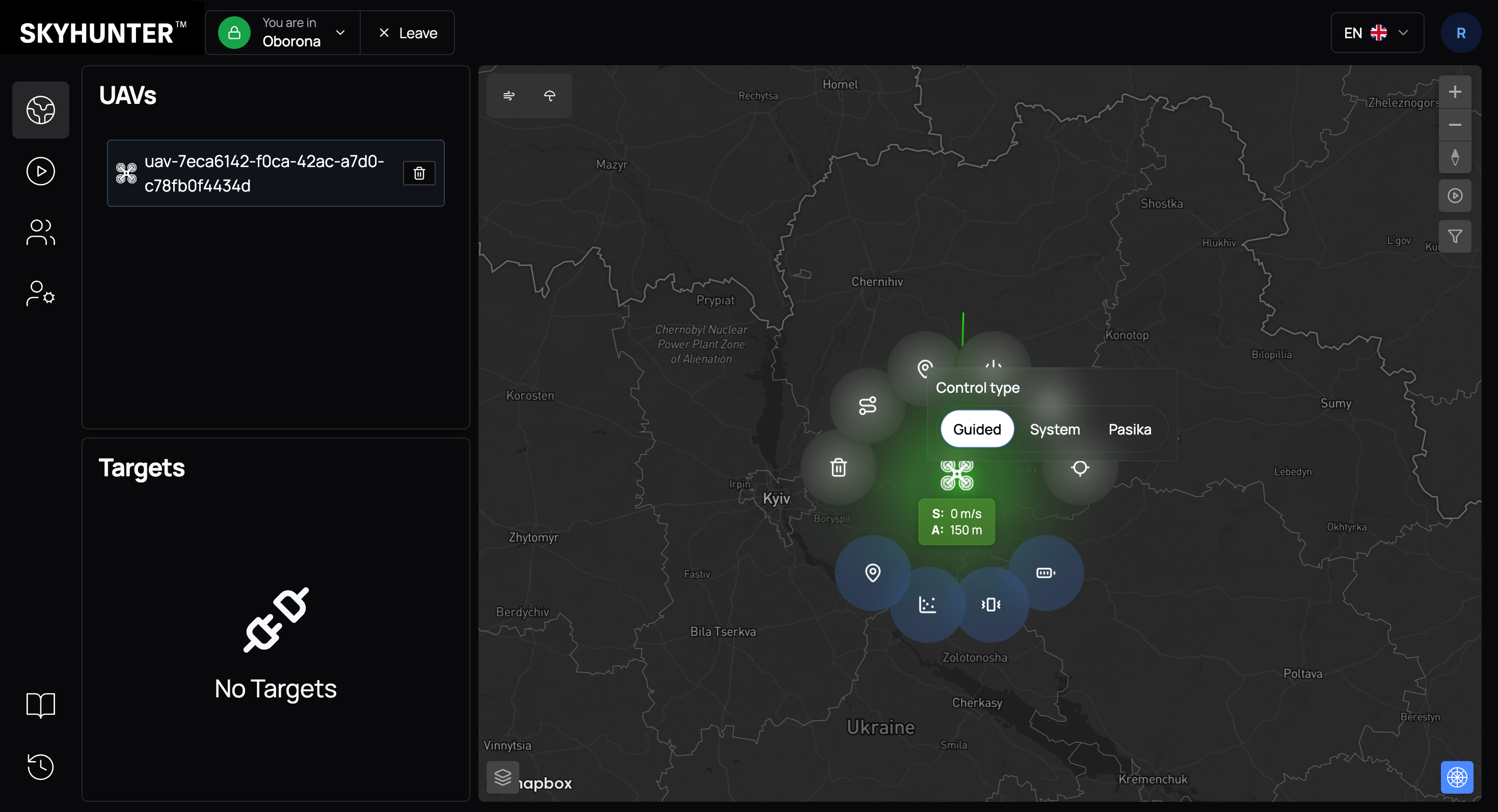
Control type
Задає режим керування дроном:
- Guided - керування за алгоритмами автопілоту;
- System - керування за алгоритмами SkyHunter;
- Pasika - керування за алгоритмами SineLink Pasika.
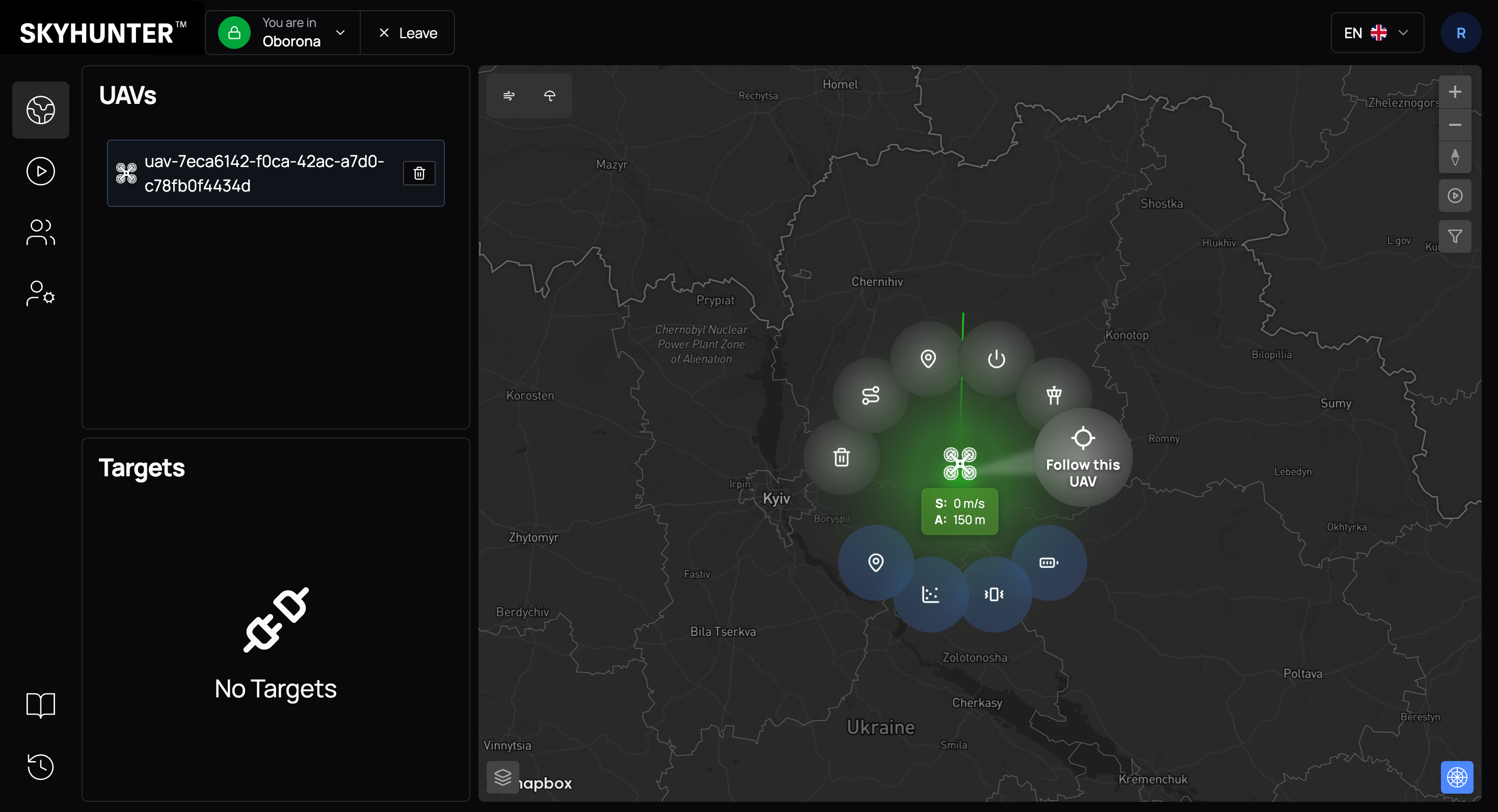
Follow this UAV
Команда використовується для фокусування камери на обраному БПЛА. Після активації інтерфейс автоматично центрує карту на цьому дроні та динамічно супроводжує його переміщення в реальному часі.
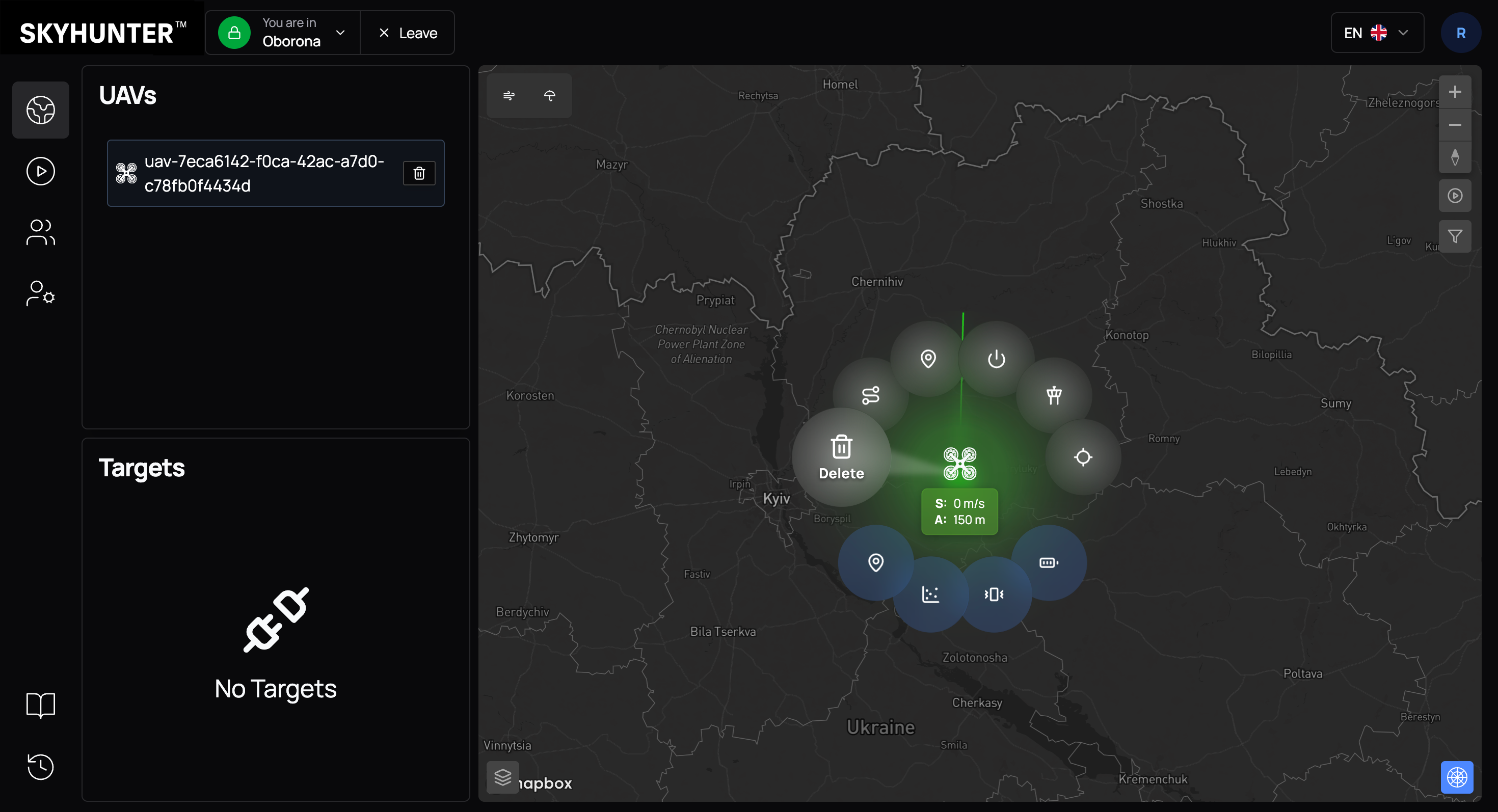
Delete
Команда використовується для очищення поточного стану симулятора та скидання активних з’єднань. Вона дозволяє перезапустити роботу симульованого дрону у випадку зависання, втрати синхронізації або інших технічних проблем. Після виконання команди симулятор переходить у початковий стан і готовий до повторного запуску.
Нижня секція – діагностика та технічний стан
Нижнє кільце містить технічні показники, які дозволяють оператору швидко оцінити стан БПЛА та прийняти рішення.
Система використовує кольорові індикатори для оцінки даних:
| Колір | Значення |
|---|---|
| 🟢 Зелений | Система працює в нормальному режимі |
| 🟠 Помаранчевий | Треба звернути увагу |
| 🔴 Червоний | Ситуація критична |
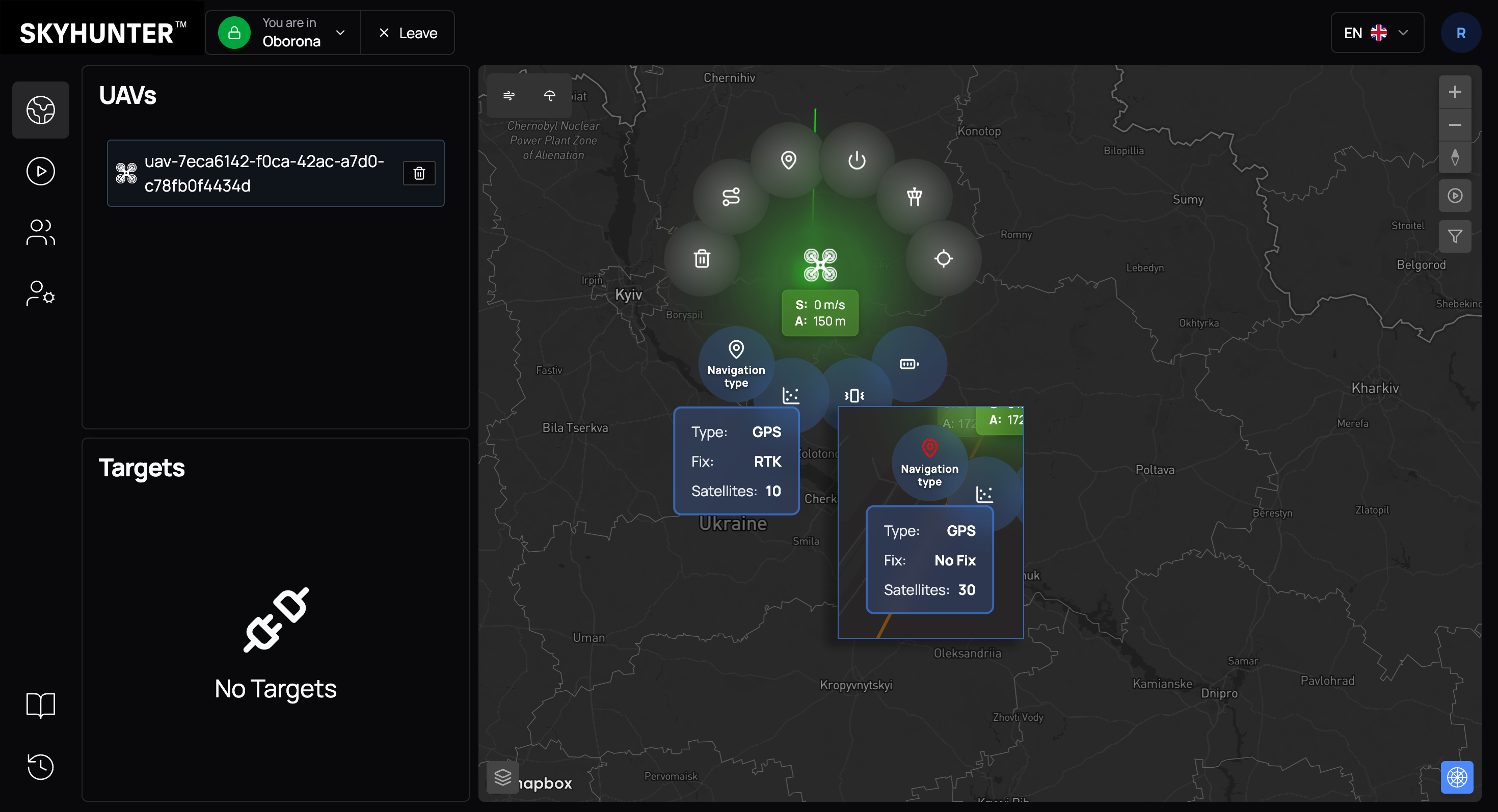
Navigation status
Показує:
- активний тип навігації (GPS / Beacons / Radar);
- тип фіксації (наприклад, RTK);
- кількість супутників;
- якість сигналу.
Цей розділ дозволяє оперативно визначити, чи достатньо точні дані позиціонування для виконання завдання.
| Колір | Значення |
|---|---|
| 🟢 Зелений | Навігаційні дані отримуються в повному обсязі в нормальній якості |
| 🟠 Помаранчевий | Низька якість навігаційних даних |
| 🔴 Червоний | Навігаційні дані відсутні (немає GPS, маяків або радарних даних) |
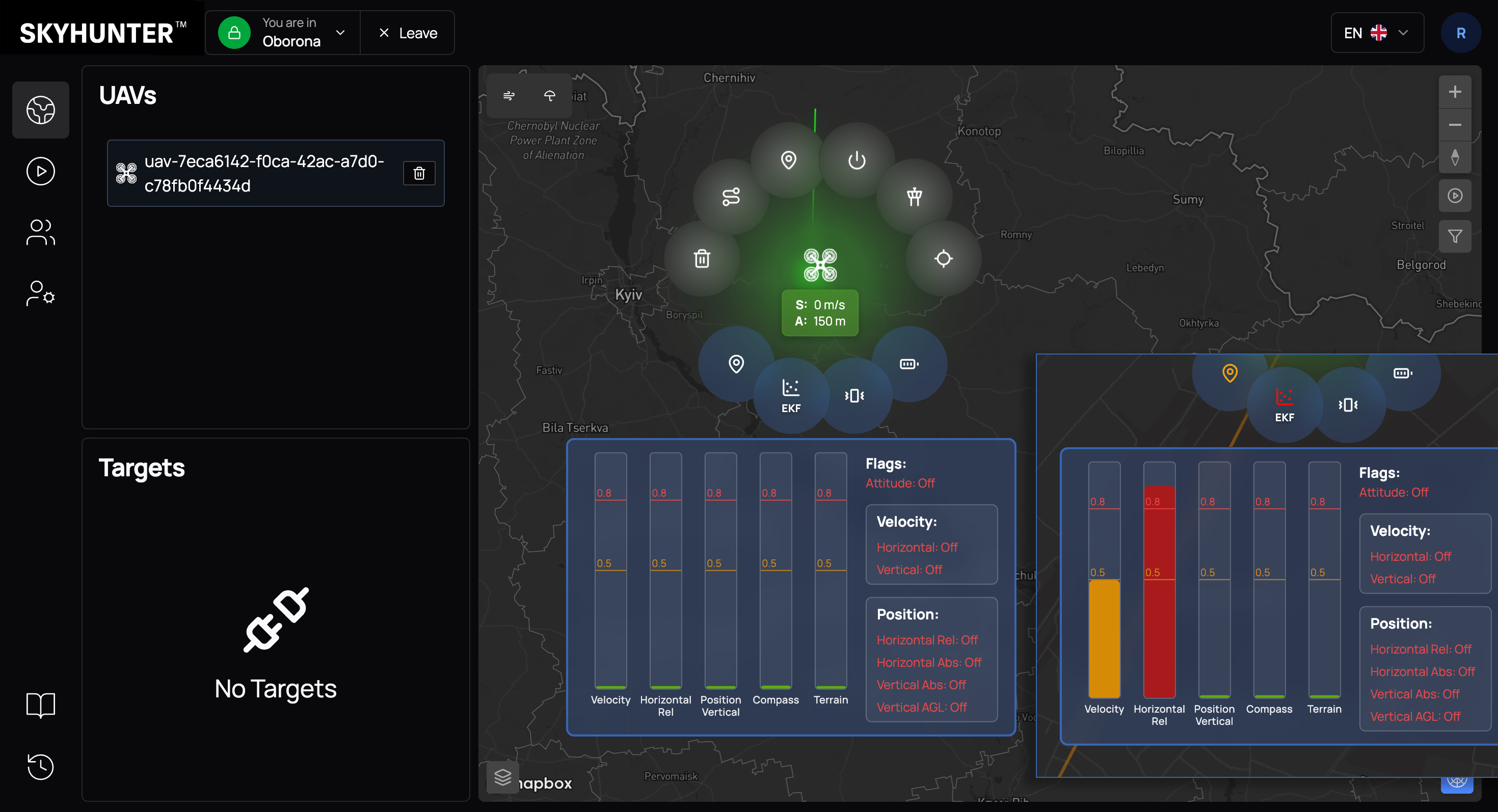
EKF
EKF (Extended Kalman Filter) відображає рівень довіри до сенсорів та стан алгоритмів оцінки положення.
Відображаються показники відносної похибки для датчиків:
- швидкості;
- горизонтальної позиції;
- вертикальної позиції;
- магнітного поля (компасу).
Це ключовий інструмент для діагностики проблем з навігацією або сенсорами.
| Колір | Значення |
|---|---|
| 🟢 Зелений | Все працює в нормальному режимі |
| 🟠 Помаранчевий | Значення помилки EKF перевищує 0.5, але не більше 0.8. Це вказує на проблеми з вимірюваними параметрами (вертикальна або горизонтальна позиція, компас). У більшості випадків причиною є неякісні навігаційні дані від зовнішніх джерел, таких як маяки або радар. |
| 🔴 Червоний | Значення помилки EKF 0.8 або більше. У цьому випадку автопілот продовжує працювати на основі інерціальної навігаційної системи, однак існує ризик виникнення помилки та відключення ІНС, що є небажаним режимом роботи. |
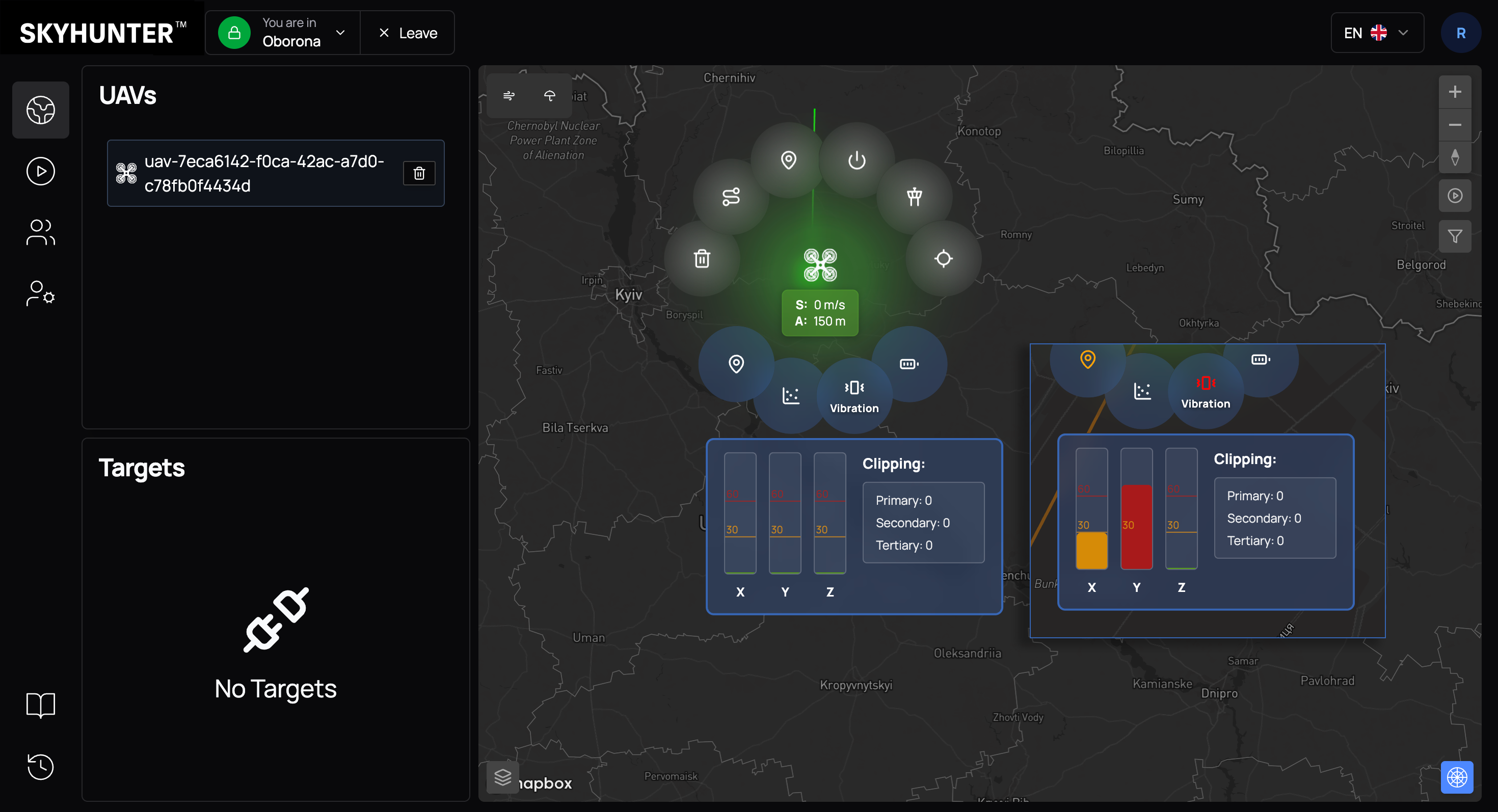
Vibration
Відображає рівень вібрацій по осях X, Y, Z, а також лічильники clipping (кількість вимірів в максимальних положеннях акселерометра).
Регулярний контроль цього параметра підвищує надійність польоту.
| Колір | Значення |
|---|---|
| 🟢 Зелений | Значення до 30. Нормальний рівень вібрацій. Робота датчиків та інерціальної системи стабільна. |
| 🟠 Помаранчевий | Значення 30–60. Підвищений рівень вібрацій, який повністю не фільтрується системою, але залишається прийнятним для виконання польоту. |
| 🔴 Червоний | Значення понад 60. Зона підвищеного ризику. Політ можливий, але сильні вібрації створюють шум у датчиках, що може призвести до нестабільної роботи інерціальної навігаційної системи. Причиною можуть бути неправильне налаштування борта або конструкційні вібрації платформи. Політ у таких умовах можливий, але стабільність навігації може бути знижена. |
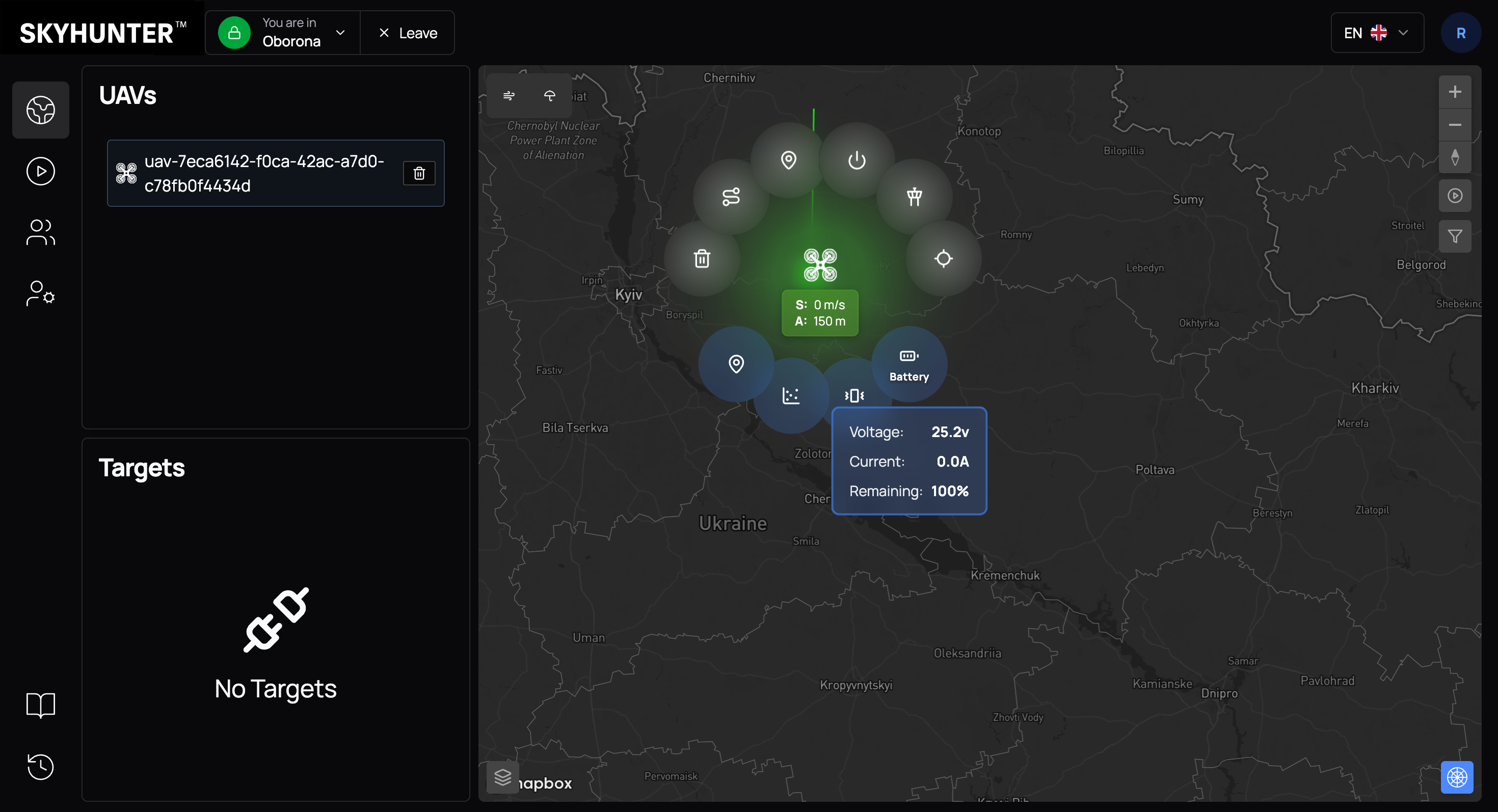
Battery
Показує ключові параметри живлення:
- напругу;
- споживаний струм;
- залишковий відсоток заряду.
Ці дані критично важливі для:
- планування часу перехоплення;
- розрахунку дистанції повернення;
- прийняття рішення про аварійне завершення місії.
| Колір | Значення |
|---|---|
| 🟢 Зелений | Рівень заряду батареї понад 50%. Нормальний режим роботи, обмежень для виконання місії немає. |
| 🟠 Помаранчевий | Рівень заряду батареї 20–50%. Залишок енергії обмежений. Рекомендується планувати завершення місії або повернення БПЛА. |
| 🔴 Червоний | Рівень заряду батареї менше 20%. Критично низький рівень заряду. Необхідно негайно завершити місію та виконати посадку БПЛА. |